
Réalisations
Nous vous accompagnons quelle que soit la taille de votre structure dans votre démarche d’innovation et de R&D. Nous sommes à vos côtés dans la mise en place d’une chaine complète de valorisation des besoins et des savoirs.
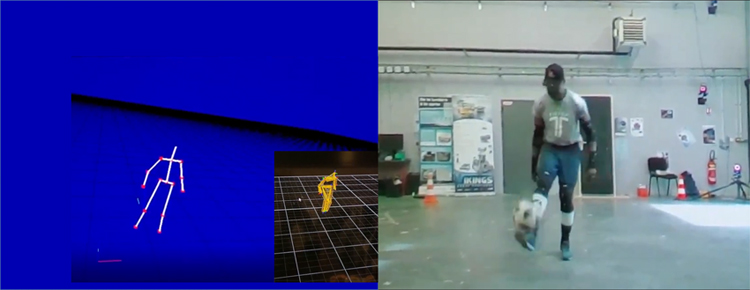
TIBTOP (Start up)
Objectif

• Concevoir un système de localisation pour les joueurs de football basé sur un protège-tibia connecté
Réalisations
• Optimisation basée sur le GPS
• Évaluation des performances avec nos 20 caméras Vicon en intérieur ainsi qu’un sac à dos équipé d’un GPS RTK
• Évaluations et qualification de technologies de localisation Ultra WideBand (UWB) en intérieur et extérieur
Compétences mises en œuvre
Développement électronique/mécanique/logiciel, localisation, filtrage, expérimentation, analyse, optimisation.
Total Projet ARGOS
Objectifs
• Concevoir une plateforme robotique capable d'inspecter de façon autonome une plateforme pétrolière
• Surveiller les états de divers manomètres, vannes et fuites de gaz
Réalisations
• Conception complète (mécanique et électrique) des plateformes robotiques
• Localisation légère en temps réel centimétrique basée sur des données LiDAR
• Traitement de l’information basé sur de l’apprentissage
Compétences mises en œuvre
Développement électronique/mécanique/logiciel, localisation Lidar, perception vision, intégration système.
Safran Electronics et Defense
Objectif
• Concevoir un algorithme de perception et de contrôle pour donner la capacité à un robot à chenille de traverser les escaliers de manière autonome (monter et descendre)
Réalisations
• Détection robuste des escaliers (depuis le haut vers le bas des marches)
• Contrôle visuel-inertiel du robot dans l’escalier
• Asservissement des flippers innovants pour maximiser l’adhérence du robot
Compétences mises en œuvre
Développement logiciel, Perception Vision Stéréo, Localisation, planification, contrôle.
Transdev STA
Objectifs
• Concevoir un algorithme de localisation robuste et précis pour véhicule autonome
• L’algorithme doit être capable de s’exécuter sur CPU et GPU avec des accès concurrents
Réalisations
• Localisation légère en temps réel avec données LiDAR
• Exécution de manière hybride et distribution sur CPU et GPU
• Utilisation commerciale par Transdev dans ses navettes de transports publics autonomes
Compétences mises en œuvre
Développement logiciel CPU/GPU, Localisation Lidar, filtrage, expérimentation, intégration.
CARNOT ESP
Objectifs
• Concevoir un système de surveillance de la qualité de l’air en plein air basé sur des capteurs de références dans les tests de pollutions de véhicules
• Capacité de réaliser des mesures sur des zones sans systèmes de surveillance de la pollution
Réalisations
• Système de monitoring autonome
• Traitement des données et visualisation
• Mesures performantes au plus proche de la route
Compétences mises en œuvre
Développement logiciel/mécanique/électronique, expérimentation, intégration, traitement de données.
Projet Interreg SURFAS
Objectif
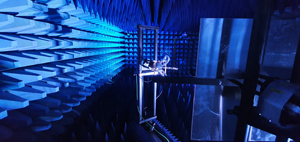
• Concevoir un système mécanique capable de reproduire des diagrammes de Surface équivalente radar en émission et réception pour des antennes en émission dans une chambre full anéchoïque existante
Réalisations

• Un système de positionnement 6 degrés de libertés
• Un design optimisé pour la chambre full anéchoïque existante
• Un contrôle et retour en temps réel
Compétences mises en œuvre
CAO (Conception Assistée par Ordinateur), réalisation mécanique, intégration, tests, CEM
Ils nous font confiance
![]()
Evaluation des capteurs innovants LiDARs flash LEDDARTECH dans le domaine du véhicule autonome.
IXBLUE / Transdev


Travail collaboratif sur la qualification et le développement de la solution Stop&Go Optimetre
Vidéos
Découvrez toutes nos vidéos sur notre chaine YouTube
Nous contacter : sird@esigelec.fr

